(3)有关寿命的用语
机械寿命:指接点不通电,以规定的操作频率将过行程(OT)设定为规格值使其运行时的开关寿命。
电气寿命:在接点上连接额定负载,以规定的操作频率将过行程(OT)设定为规格值进行开关时的开关寿命。
(4)标准试验状态
开关的试验条件如下。
环境温度:20±2℃、相对湿度:65±5%RH、气压:101.3kPa
(5)N水平参考值
表示可靠度为60%(λ60)下的故障水平。
λ60=0.5×10-6/次表示在可靠度为60%下,故障率为次以下。
(6)接点的形状和种类
(7)接点间隔
接点间隔规定为0.25mm、0.5mm、1.0mm、1.8mm 4种。接点间隔是设计时的目标。使用时,需要最小接点间隔的话请另外确认后进行选择。一般接点间隔的标准为0.5mm。对于相同的开关机构,接点间隔越小MD就越小,灵敏度也越高,机械方面的寿命(寿命)也越长,但直流的断路性能和抗振动、抗冲击方面就不利了。微动开关由于电流开关会损耗接点,接点间隔变大, MD加大则灵敏度下降,因此为了实现高灵敏度使用接点间隔0.25mm的微动开关时,必须保持较小的开关电流,以减小电流开关引起的接点损耗。接点间隔大的产品,抗振动、抗冲击性和断路性能良好。
关于MD (应差距离)请参见(10)动作特性用语(745页)。
|
形状 |
名称 |
主要使用材料 |
加工方法 |
主要用途 |
|
|
|
|
|
为了在微小负载区域得到稳定的接触可靠性时使用。 |
|
|
横杆 |
金合金银合金 |
焊接 |
|
|
|
针 |
银 |
为了在继电器负载程度的负载区域中提高接触可靠性而使用。 |
|
|
|
铆钉 |
银镀银银合金镀金 |
在从一般用负载到高负载区域中最为广泛使用。 |
(7)接点间隔
接点间隔规定为0.25mm、0.5mm、1.0mm、1.8mm 4种。接点间隔是设计时的目标。使用时,需要最小接点间隔的话请另外确认
后进行选择。一般接点间隔的标准为0.5mm。对于相同的开关机构,接点间隔越小MD就越小,灵敏度也越高,机械方面的寿命
(寿命)也越长,但直流的断路性能和抗振动、抗冲击方面就不利了。微动开关由于电流开关会损耗接点,接点间隔变大, MD
加大则灵敏度下降,因此为了实现高灵敏度使用接点间隔0.25mm的微动开关时,必须保持较小的开关电流,以减小电流开关引起
的接点损耗。接点间隔大的产品,抗振动、抗冲击性和断路性能良好。
|
表示字符 |
接点间隔 |
直流电流切断 |
动作力和行程 |
精度及寿命(寿命) |
抗振动抗冲击 |
主要优点 |
|
H |
0.25mm |
△ |
极小 |
☆ |
△ |
高精度·高寿命 |
|
G |
0.50mm |
○ |
小 |
◎ |
○ |
一般用 |
|
F |
1.00mm |
◎ |
中 |
○ |
◎ |
G与E的中间特性 |
|
E |
1.80mm |
☆ |
大 |
△ |
☆ |
抗振动·抗冲击性好 |
|
☆:优 |
◎:良 |
○ :普通 |
△:劣 |
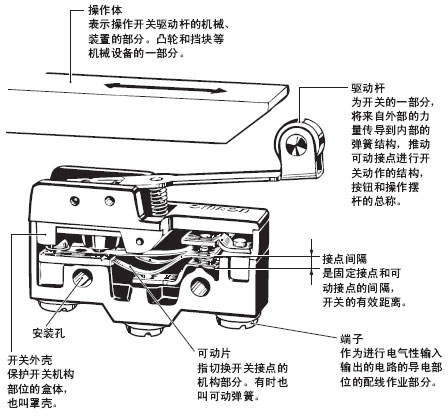
(8)速动机构
速动机构,可以使可动接点迅速地从一个固定接点移动到其他固定接点,而尽可能不受操作速度的影响。例如,即使是闸刀开关,如果快速操作手柄,动作就会变快,但是,操作手柄的速度与接点运动速度相关的这种机构不叫速动型,而叫做缓动型。接点的开关速度越快,接点间产生电弧的持续时间就会越短。
这样,就会导致接点的消耗、损伤减少,并可以维持稳定的特性。但是,在该开关速度中,除有效减少电弧量的速度界限(经济速度)外,也有机械问题的界限,特别是,闭路时如果开关速度过快,可动接点与固定接点的冲击能量就会变大,冲击形成的跳跃现象(振动或摩擦闭合)会产生电弧,此时会严重损耗接点,有时还会不能打开电路,导致接点熔化。进行这种快速动作的机构,一般会使用具备死点(从一个状态跳跃性地变化到其他状态时的临界作用点)的弹簧机构。
下图表示将拉力弹簧和压缩弹簧进行组合后,形成微动开关速动机构的示例。
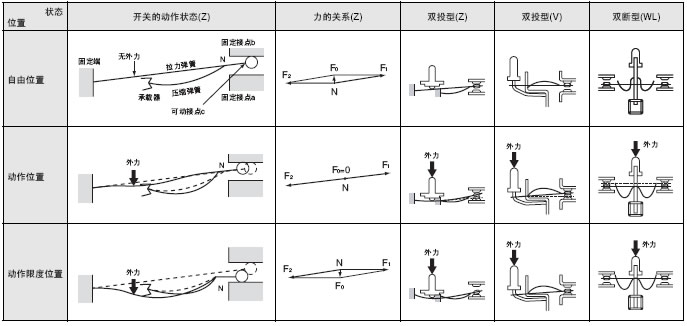
以下就有关双投型(Z)速动机构的动作原理进行说明。
如下图所示,为开关的力的关系。在未对传动器施加外力的自由位置中,由于受到2个力-F2与F0的影响,压缩弹簧的反作用力F1处于平衡状态。F0为将可动接点c推到固定接点b的压力。
接着,通过传动器对拉力弹簧的一部分施加力,使拉力弹簧移位,此时, N点的力F1和F2将依次变大,夹角接近180°,不久,仅F1和F2处于平衡状态,即F0=0。从自由位置到F0=0间存在滑
动作用,会使接点向水平方向移动,并进一步弯曲压缩弹簧。从F0=0的位置,通过进一步施加外力,使拉力弹簧微量移位,就会产生反方向的力-F0,以弯曲压缩弹簧的最大强力将可动接点c
从下方向压出,可动接点c 就会穿过空间向对面的固定接点a 移动。
利用这一动作原理,微动开关以开关固有的切换速度(离开速度)切换接点,而与按住拉力弹簧时产生外力的速度无关。F0=0时的位置称为动作位置,与拉力弹簧的一部分通过死点的位置基
本一致。
消除外力进行复位操作时,也是基于相同的原理,而此时弹簧的弯曲反作用力即为复位原动力。
微动开关基于拉力弹簧和压缩弹簧的组合进行动作的原理图
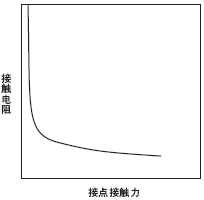
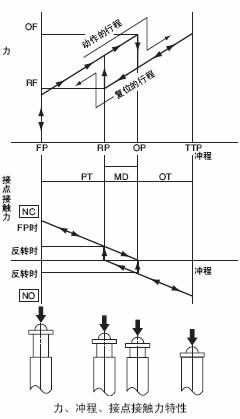
(9)接触电阻·接点接触力特性
接触电阻根据接点接触力而变化,下图表示了其关系。接点接触力变大的话接触电阻变得较稳定(变小),相反当接触力变小的话就开始变得不稳定(变大)。
接触电阻· 接点接触力特性
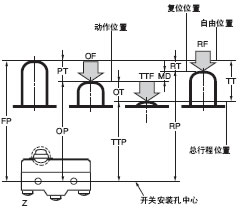
(10)动作特性的相关用语
|
动作特性的定义 |
分类 |
用语 |
略称 |
单位 |
偏差 |
定义 |
|
|
力 |
动作力 |
OF |
N |
最大 |
从自由位置运行到动作位置必须加到驱动杆上的力。 |
|
回复力 |
RF |
N |
最小 |
从总行程位置运行到复位位置必须加到驱动杆上的力 |
||
|
总行程所需的力 |
TTF |
N |
|
从自由位置运行到总行程位置必须加到驱动杆上的力 |
||
|
行程 |
预行程 |
PT |
mm、 |
最大 |
从驱动杆的自由位置到动作位置的移动距离或移动角度 |
|
|
过行程 |
OT |
mm、 |
最小 |
从驱动杆的动作位置到总行程位置的移动距离或移动角度 |
||
|
应差距离 |
MD |
mm、 |
最大 |
从驱动杆的动作位置到复位位置的移动距离或移动角度 |
||
|
总行程 |
TT |
mm、 |
|
从驱动杆的自由位置到总行程位置的移动距离或移动角度。 |
||
|
位置 |
自由位置 |
FP |
mm、 |
最大 |
没有施加外力时驱动杆的位置 |
|
|
动作位置 |
OP |
mm、 |
± |
驱动杆受到外力,动接点正好从自由位置状态开始反转时的驱动杆的位置 |
||
|
复位位置 |
RP |
mm、 |
|
减少驱动杆上的外力,可动接点从动作位置状态正好开始返回自由位置状态时的驱动杆的位置。 |
||
|
总行程位置 |
TTP |
mm、 |
|
驱动杆到达传动停止位置时驱动杆的位置。 |
关于偏差的解释例
(例)Z-15G-B OF(动作力) 2.45~3.43N
解释:表示将加在驱动杆上的力从0开始增加到3.43N,无论哪个开关都应动作。开关行程的设定请参考750页的「①关于操作行程设定」。
(11)力、冲程、接点接触力特性微动开关的动作特性用力、冲程特性来表示。下图表示这一特性。即将横轴冲程(传动器的行程)施加到纵轴传动器上,取得此时所施加的力。微动开关的特点如下:
①在动作时和还原时,力急剧变动,同时发出开关的切换音,由此可以判断开关的动作位置(OP) 和复位位置(RP)。
②由于存在响应差的行程(MD),因此,即使操作传动器的操作体产生移动或上下晃动,可动接点中的其中一个固定接点也是稳定的,因此,可动接点适用于机械检测用开关。
③由于接点的切换会快速进行,因此,在电流开关时电弧连接时间较短的小型开关中,可以开关较大的电流。
下图表示冲程和接点接触力的关系。在自由状态下,随着将传动器逐渐押入,接点接触力将会逐渐减少,而到达OP后,接点接触力将会变为零,可动接点从常闭(NC)向常开(NO)反转,随即产生接触力。如果再次押入传动器, NO侧的接触力将会增大。传动器复位时, NO侧变为零,接着就会在NC侧产生接触力。
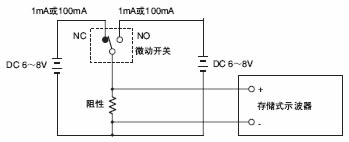
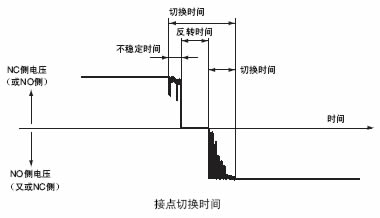
(12)接点切换时间操作速度和接点切换时间的关系如右图所示。随着传动器的操作速度逐渐变慢,接点切换时间会逐渐变长。因此,应用规定的最小操作速度来测定接点切换时间。下图中的测定电流规定为如下:微小负荷用微动开关的通电电流为1mA,一般用途微动开关的通电电流为100mA。如下图所示,接点切换时间为不稳定时间、反转时间及振动时间之和,一般微动开关的接点切换时间为5~15msec。这里,不稳定时间是由接触电阻不稳定引起的,而接触电阻不稳定是由前述接点反转前的接点接触力降低及接点摩擦闭合所导致的。
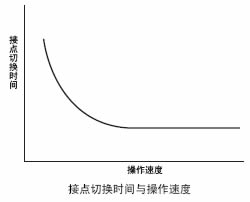
速动机构的机械反转会产生反转时间。可动接点冲击固定接点时的振动会产生振动时间。不稳定时间和振动时间会使接点发热,引起接点熔化,而在和电子电路连接后,还可能会引起电子电路的误动作。因此,设计微动开关时,应尽量缩短不稳定时间和振动时间。
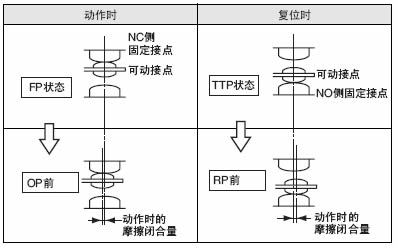
(13)接点的摩擦闭合
根据速动机构的种类不同,有的微动开关在接点部几乎不发生摩擦闭合(滑动)。摩擦闭合作用,指可动接点在某一接触力下在固定接点面上滑动的动作。下图表示可动接点动作时和复位时的摩擦闭合说明图。摩擦闭合会产生两种效果,即对接点表面的净化作用和因冲击电流等引起接点熔化时的跳闸作用。
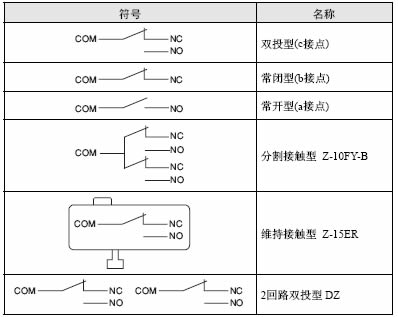
(14)端子符号和接触形
|
符号 |
端子符号 |
|
COM |
共通端子 |
|
NC |
常闭端子 |
|
NO |
常开端子 |
(15)端子的种类
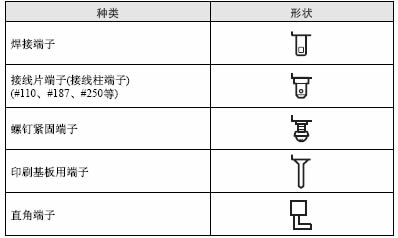
注. 此外,还有端子连接部为塑封的带导线产品和单触连接器对应型产品。
(16) 接触类型的种类
|
PTI |
基于UL黄皮书的分类 |
|
500 |
PLC等级1 400≤CTI<600 (必须对材料厂家进行CTI500 认证的确认) |
|
375 |
PLC等级2 250≤CTI<400 (必须对材料厂家进行CTI375 认证的确认) |
|
300 |
PLC等级2 250≤CTI<400 (必须对材料厂家进行CTI300 认证的确认) |
|
250 |
PLC等级2 250≤CTI<400 |
|
175 |
PLC等级3 175≤CTI<250 |
·操作次数:表示规格中规定的耐久试验的开关次数。各厂家从下表的次数中选择,在开关上用符号表示。在IEC规格中高频率操作的开关标准为50000次,低频率操作的开关标准为10000次。
|
次数 |
表示符号 |
|
100,000 |
1E5 |
|
50,000 |
5E4 |
|
25,000 |
25E3 |
|
10,000 |
无标记 |
|
6,000 |
6E3 |
|
3,000 |
3E3 |
|
1,000 |
1E3 |
|
300 |
3E2 |
·使用环境温度:开关可使用的温度范围。表示符号的含义请参考下表。
|
表示符号 |
T85 |
25T85 |
|
温度 |
0~+85℃ |
-25~+85℃ |
· 焊接端子型1:根据焊接端子的耐热性来区分的一种类型,满足下面的试验条件。
焊接槽使用端子:在+235 ℃的焊接槽中按规定的速度、时间、深度放入焊接端子,端子应没有松动,绝缘距离应无变化。
钎焊烙铁使用端子:在按规定的钎焊烙铁的尖端温度+350℃下,将直径0.8mm的焊锡在端子上溶化2~3秒,端子应没有松动,绝缘距离应无变化。
·焊接端子型2:根据焊接端子的耐热性来区分的一种类型,满足下面的试验条件。
焊接槽使用端子:在+260℃的焊接槽中按规定的速度、时间、深度放入焊接端子,端子应没有松动,绝缘距离应无变化。
钎焊烙铁使用端子:在规定的钎焊烙铁的尖端温度+350 ℃下,将直径0.8mm的焊锡在端子上溶化5秒,端子应没有松动,绝缘距离应无变化。
·空间距离:指2个带电部位间的空间的最小距离或者紧贴在带电部位和开关外廓(绝缘物)上的金属机构间的空间的最小距离。
·漏电距离:指2个带电部位间的绝缘材料的表面的最小距离或者紧贴在带电部位和开关外廓(绝缘物)上的金属机构之间绝缘材料表面的最小距离。
·绝缘层(Distance through Insulation):紧贴带电部位和开关外廓(绝缘物)的金属机构之间的最小直线距离,即空间距离加上外廓绝缘物的板的厚度。没有空间距离时为外廓绝缘物的板的厚度值。